
Meow Playground is a cozy online game where you dress-up, explore a virtual world, make friends, and go on adventures together.
Free To Play!

Join the world of Meow Playground in three easy steps
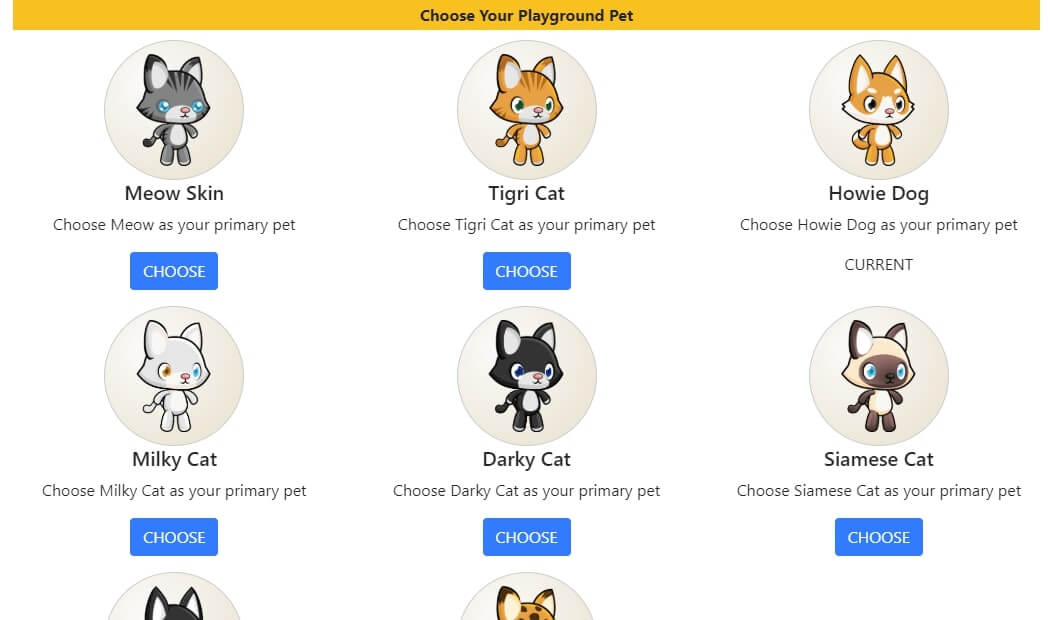
Sign up and pick your animal character. Customize your look with skins, hats, accessories, and more.

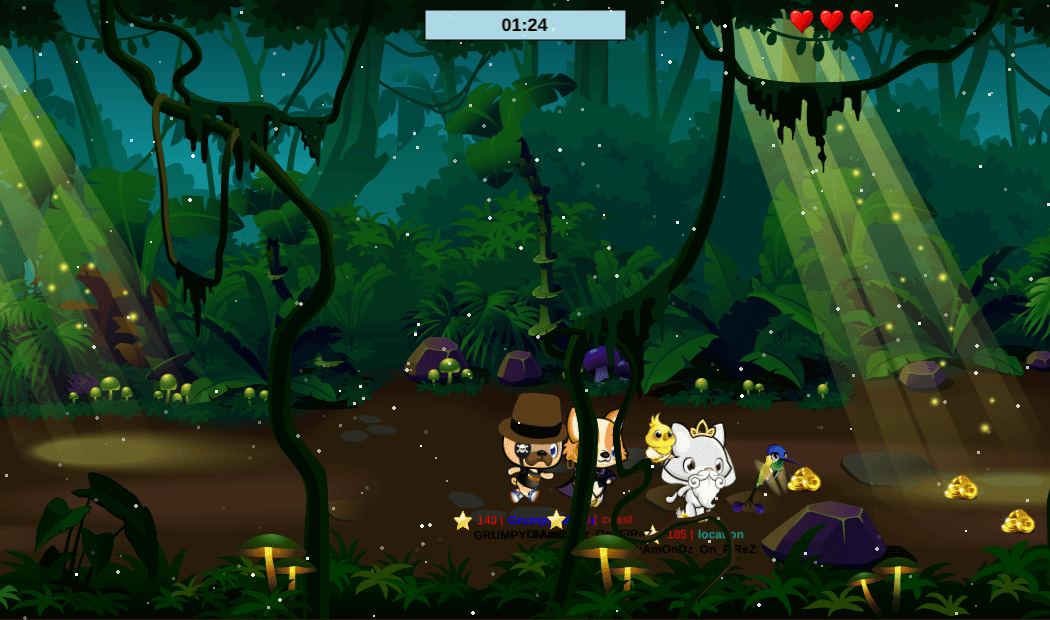
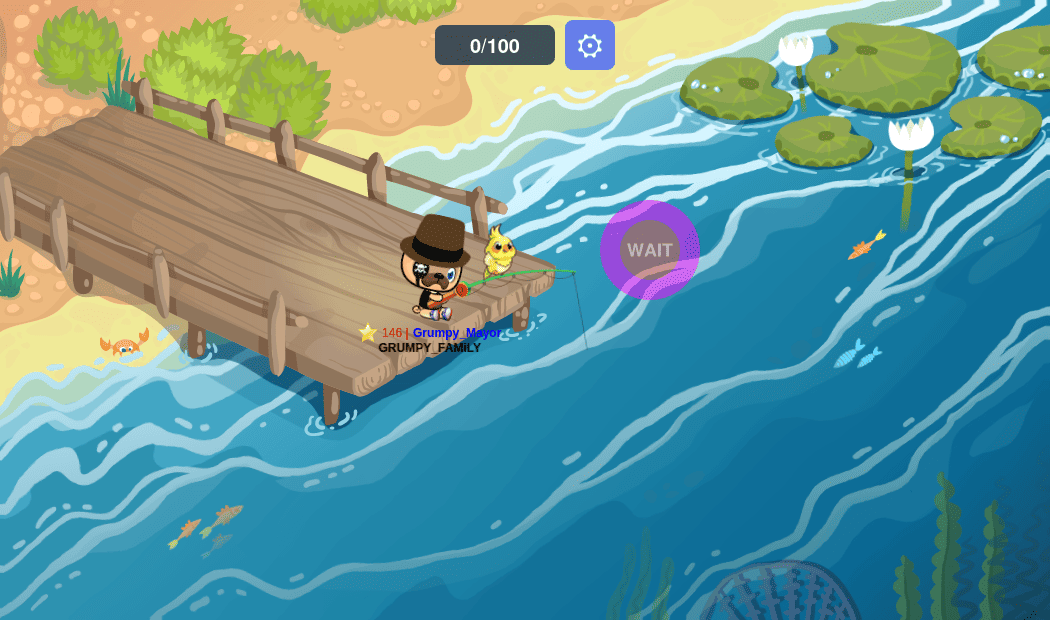
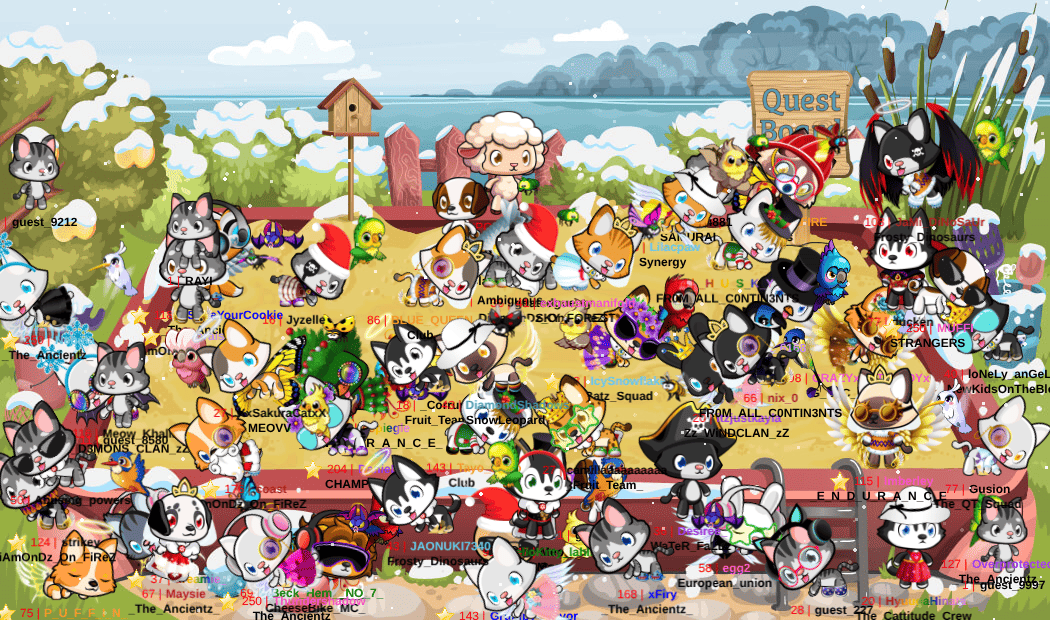
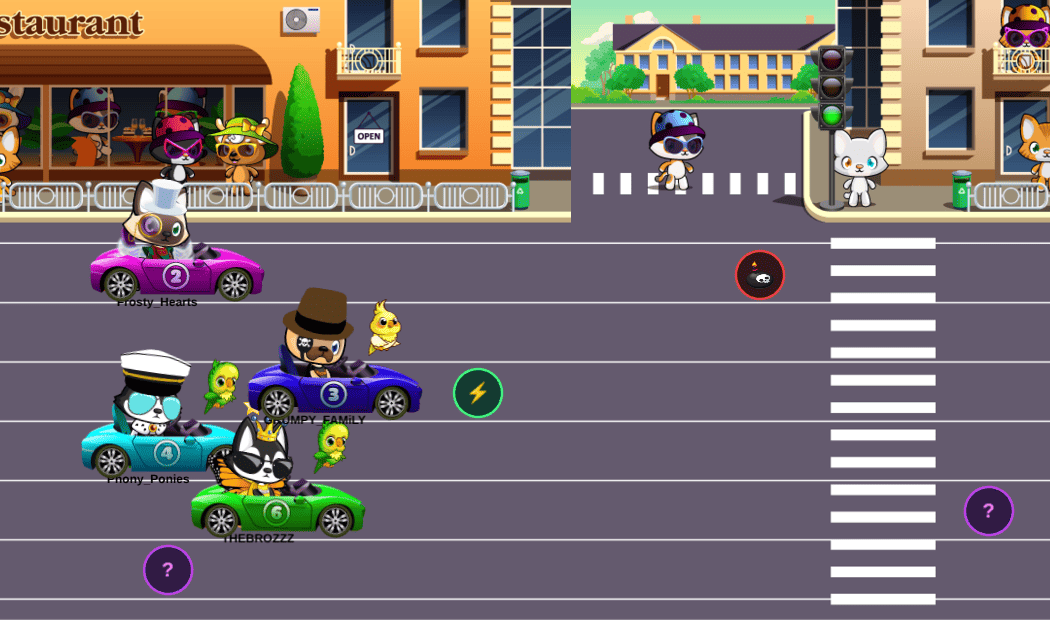
Roam the playground, chat with other players, dig for coins, tend your garden, and discover hidden areas.
Complete quests, join a clowder, climb the leaderboard and collect daily rewards as you grow your pet.

Standing out in the playground with an unforgettable style.
The MCP2515 relies heavily on hardware interrupts ( /INT pin) to alert the host MCU of incoming messages. Basic libraries often fail to toggle this pin properly, causing data packets to drop during simulation.
If you’ve found a working library, here’s how to install it:
For Arduino-based simulations, the library choice significantly impacts bus capacity and reliability: autowp-mcp2515
: A highly mature option with strong community support, specifically noted for its excellent handling of extended CAN IDs : Noted for its internal buffering
If you have ever designed a Controller Area Network (CAN bus) system for automotive, industrial, or robotics applications, you know the drill: write the code, flash the hardware, test, fail, debug, repeat. This cycle is slow and expensive. mcp2515 proteus library better
Upgrading to a better MCP2515 Proteus library removes the guesswork from CAN bus embedded development. By replacing unstable, basic models with community-optimized VSM libraries, you can reliably test complex networks, filter logic, and error-handling routines right on your PC.
This article explores what constitutes a "better" MCP2515 library for Proteus, why it's crucial for your projects, and how to find/implement one to improve your simulation accuracy. 1. The Limitations of Default Proteus MCP2515 Libraries
Simulate data transmission (TX) and reception (RX) between multiple nodes accurately.
A "better" library doesn't just include the MCP2515 chip; it includes a combined, ready-to-use module comprising the MCP2515 controller and the MCP2551 transceiver. 2. What Makes an MCP2515 Library "Better"? The MCP2515 relies heavily on hardware interrupts (
The standard MCP2515 Proteus library provides a basic model of the chip, allowing users to simulate its functionality in a CAN bus system. However, this library has several limitations:
Link the TXCAN and RXCAN pins of the MCP2515 to the respective pins on the MCP2551 transceiver.
A high-quality Proteus library for the MCP2515 offers . This allows you to: Arduino MCP2515 CAN interface library - GitHub
When searching for an improved MCP2515 Proteus library, you need a benchmarking checklist. A superior model will exhibit the following behaviors: This cycle is slow and expensive
To upgrade your Proteus environment, follow this practical guide:
Restart your application to load the new component. 4. Key Improvements in Simulation Performance
The firmware for this setup is handled by the by 'autowp' or 'codeljo'. The code manages the SPI communication to perform key tasks:
Upgrading to a better MCP2515 Proteus library eliminates the guesswork from automotive and industrial embedded system development. By ensuring your simulation platform supports precise SPI register emulation, proper interrupt handling, and realistic transceiver bridging, you can write, debug, and perfect your CAN network layouts entirely in software before ever melting a single drop of solder.